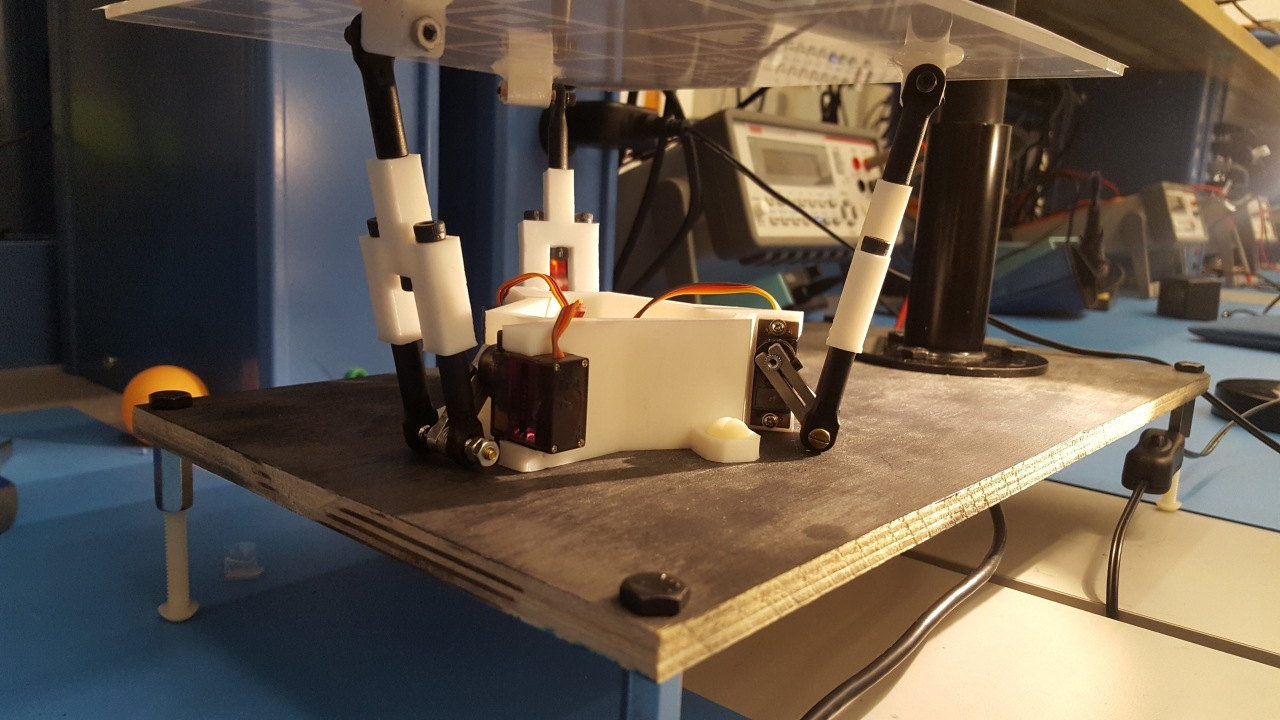
3 DOF Ball Balancing Platform with Robot Vision
A 3-DOF servo actuated platform that automatically balances/positions a ball. Uses an RGB camera and computer vision algorithms (OpenCV) for real-time closed-loop ball position feedback.
Developed from scratch in a team of 2 for an open ended Mechatronics course project. I architected the solution and handled the computer vision tracking software algorithms, platform inverse kinematics, some mechanical design/fab, and component spec’ing/sourcing.
Check out the video demo that I probably spent too much time editing.